Heads: Shinichi Hirai
Contact: Yuki Satake
Date: 2024 -
Mailing address:
Dept. Robotics, Ritsumeikan Univ.
Kusatsu, Shiga 525-8577, Japan
Supported by:
Associated lab/group:
|
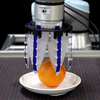
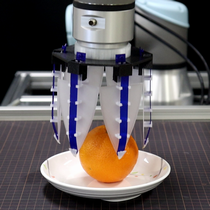
Contact-Driven Hand
Heads: Shinichi Hirai Date: 2024 -
Mailing address:
Supported by:
Associated lab/group:
|
| Project Description |
We develop robotic hands driven by contact with the floor without any actuators.
| Personnel |
| Name | Title | Degree |
| Publications |
| Notes |
|
| Related Sites |