| Project Description |
This study investigate dynamics of soft contacts with design of materials and forms of soft robots.
In this research, the contact between soft robot body and the environment is referred to as soft contact. Investigating dynamics of soft contact during action of soft bodies, we clarify materials and forms for desirable soft contact. Especially, we focus on object manipulation by soft hands and and tactile sensing by soft sensors, to formulate the dynamics of soft contacts. We will design materials and forms of soft robots and soft sensors to realize their desired behavior. Furthermore, we will establish a method for creating materials and structures that realize the desired deformation characteristics. We aim to derive desirable properties through the analysis of soft contact and to design materials and structures that realize the desired properties. (proposal in japanese)
|
|
|
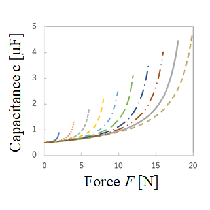
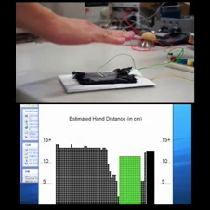
| mechanics of jumping | capacitive force sensor | conductive fabric sensor |
| Members |
| Hirai, Shinichi | Professor, Dept. Robotics, Ritsumeikan Univ. |
| Publication |
| Notes |
| Related Sites |